عرض سلام و شاد باش فراوان به مناسبت عید فرخنده نوروز خدمت همه ی دوستان گُلم. برای همه ی هموطنان عزیزم سالی پر از موفقیت و شادمانی آرزو می کنم ، امیدوارم همیشه دلهاتون شاد و بهاری باشه.
در جلسه ی گذشته در مورد ساختار ADC یا همان مبدل آنالوگ به دیجیتال توضیحات مفصل داده شد. در این جلسه، نحوه ی استفاده از ADC در برنامه را توضیح خواهیم داد.
در میکرو کنترلر ATMEGA16، 8 پایه ی به ADC اختصاص داده شده، یعنی شما می توانید به صورت همزمان، خروجیِ 8 سنسور یا مدار جانبی را به میکروکنترلر خود وصل کنید و اطلاعات آن ها را به وسیله ی ADC دریافت کنید.
اما این 8 پایه کدام پایه ها هستند؟
این 8 پایه، پایه مربوط به پورت A هستند که با فعال کردن ADC در CodeWizard، این پایه ها در اختیار ADC قرار می گیرند. دقت کنید که برای استفده از ADC حتماً باید قبلاً تنظیمات را در CodeWizard انجام داده باشید.
این 8 پایه طبق شکل زیر از ADC0 تا ADC7 نام گذاری شده اند.
تكميل if-else، ساختار while، آشنايي با مبدل آنالوگ به ديجيتال(ADC) و ...
به نام خدا
با عرض سلام و خسته نباشيد خدمت همهي دوستان خوبم
اميدوارم مطالب ارائه شده تا به اينجا داراي سطح كيفي مناسبي بوده باشند و و دوستان عزيز ما بهرهوري مناسب را از اين مطالب كرده باشند. اگر پيشنهاد يا نظري در مورد اين بخش داريد حتماً با ما در ميان بگذاريد تا انشاالله بتوانيم با الهامگيري از نظرات سازنده شما دوستان عزيز، اين بخش را پربارتر كنيم.
در اين جلسه هم بحث برنامه نويسي زبان C را دنبال ميكنيم و در ادامهي مبحث جلسهي قبل، شما را با 2 ساختار كنترلي ديگر آشنا ميكنيم.
ابتدا يك نكتهي ديگر در مورد ساختار if() و else:
الزامي براي نوشتن قسمت else نيست، يعني ميتوان فقط if را بدون داشتن else استفاده كرد. همانطور كه ميدانيد، از else زماني استفاده ميكنيم كه بخواهيم در صورت نادرست بودن شروط ، دستورات مشخصي اجرا شوند(به جلسهي 31 مراجعه شود)
ابتدا بايد يك نكته رو از مطالب جلسهي پيش گوش زد كنم، براي بستن مدار Reset و همچنين كرستال خارجي، در ATMEGA16L هيچ الزامي وجود ندارد و صرفاً براي دقت بيشتر ميباشند.
در ضمن ياد آوري ميكنم كه ميكروكنترلرهاي ATMEGA16L و ATMEGA16 تفاوت خاصي در ترتيب پايهها و كارايي با يكديگر ندارند. مهمترين تفاوت اين 2 آي سي در فركانس كاري اين 2 آي سي است كه ATMEGA16L نميتواند با فركانس بيش از 8 مگاهرتز كار كند.
خوب، همانطور كه قول داده بوديم، قراره اين جلسه ساخت يك پروگرامر بسازيم كه بتوانيم به وسيلهي آن، برنامههايي كه در كامپيوتر مينويسيم را به ميكروكنترلر منتقل كنيم.
براي پروگرام كردن ميكروكنترلرهاي خانوادهي AVR روشها و پورتكولهاي متعددي وجود دارد. يكي از معروفترين و پركاربردترين پروتكولهاي موجود، STK200300 نام دارد كه ما در اين جلسه سعي ميكنيم نحوهي استفاده از اين پروتكول را آموزش دهيم.
همانطور كه گفته شد، ميكروكنترلرهاي خانوادهي AVR اين قابليت را دارند كه ميتوان آنها را مستقيماً به وسيلهي يك كابل 5 رشته به كامپيوتر متصل نموده و پروگرام كرد، و در نتيجه، نيازي به يك دستگاه مجزا براي پروگرام كردن ندارند. اين روش پروگرام كردن STK200/300 نام دارد. اين روش، به خاطر عدم نياز به هرگونه مدار جانبي و سهولت كار با آن، از محبوبيت زيادي در بين كاربران حرفهاي برخوردار است.
اولين نكته اين است كه اگر كامپيوتر شما پورت LPT(موازي) نداشته باشد، شما نمي توانيد به اين روش(يعني فقط با يك كابل 5 رشتهي ساده) ميكروكنترلر خود را پروگرام كنيد و بايد از مدارهاي پروگرامر USB استفاده كنيد. با استفاده از پروگرامرهاي USB، شما ميتوانيد با استفاده از درگاه USB هم ميكروكنترلر خود را پروگرام كنيد. ساختن اين پروگرامرها كار سادهاي نيست، اما انواع مختلف آنها در بازار موجود است كه بين 20 تا 200 هزار تومان هم قيمت دارند.
براي ديدن پورت يا درگاه LPT (موازي) ، به پشت كيس كامپيوتر خود نگاه كنيد.
اين جلسه همانطور كه قبلاً گفته بوديم، سعي ميكنيم كمي از مقدمات سخت افزاري و مدارهاي راه اندازي ميكروكنترلرهاي AVR صحبت كنيم تا دوستان بتوانند به تدريج كار عملي با Atmega16 را شروع كنند.
شروع بحثهای تخصصی نرمافزاری در میکروکنترلر، ASCII Code ، اصل ضرب و ...
از این جلسه ما وارد مبحث آموزش مقدماتی زبان C می شویم تا دوستان کمی با مقدمات برنامه نویسی آشنا بشوند. در استفاده از میکروکنترلرها برای ساخت ربات های مقدماتی مثل مسیر یاب و آتش نشان و ... ما نیازی به آموختن برنامه نویسی در حد حرفه ای نداریم و کمی آشنایی با مقدمات برای ما کافیست!!!
از ابن جلسه ما وارد مبحث میکروکنترلر میشویم. این مبحث نسبت به مباحث قبلی، نیازمند توجه و دقت بیشتری است و دوستان باید زمان بیشتری برای آموزش این مبحث صرف کنند. بخشی از این مبحث مربوط به برنامه نویسی تحت زبان C است که ما سعی می کنیم دوستان رو در حد کمی با مقدمات برنامه نویسی در این زبان نیز آشنا کنیم.
این جلسه میخواهیم شما رو با رگولاتور LM317 آشنا کنیم. رگولاتورهایی که ما تا به حال با آن ها آشنا شدهایم همگی ولتاژ خروجی ثابتی داشتند، مثلاً 7805 خروجی ثابت 5 ولت به ما میدهد و 7809 خروجی ثابت 9 ولت!!! اما با رگولاتور LM317 و به کمک یک مقاومت ثابت و یک پتانسیومتر، می توانیم سطح ولتاژ خروجی را به دلخواه خود تنظیم کنیم. البته طبیعتاً سطح ولتاژ خروجی نمی تواند از ولتاژ ورودی بیشتر باشد!
همونطور که در جلسه ي پيش گفتيم، اين جلسه ابتدا سعي مي کنيم از L298 در راه اندازي موتور ربات استفاده کنيم.
نحوه ي استفاده از L298 در يک ربات مسيرياب ساده
همونطور که در جلسات پيش توضيح داده شد، يک آي سي L298 قابليت راه اندازي 2 موتور به صورت همزمان را دارد. البته L298 يک درايور موتور نسبتاً حرفه ايست و در اين ربات ما ضرورتي در استفاده از اين آي سي نيست، و اين مطالب بيشتر جنبه ي آموزشي دارد، يعني هدف ما اينه که دوستان کاربرد عملي اين آي سي را در ربات ببينند.
در اين آي سي براي هر موتور 2 ورودي و 2 خروجي وجود دارد. 2 پايه ي خروجي را که مستقيماً به پايه هاي موتور متصل مي کنيم. (به جلسه ي هفدهم مراجعه شود).
اما 2 پايه ي ورودي هر موتور!!
در اينجا هم يکي از 2 پايه ي ورودي را مستقيماً به – متصل کرده و پايه ي ديگر را به خروجي ANDِ متناظر موتور وصل مي کنيم.
براي موتور ديگر هم دقيقاً همين روند را تکرار مي کنيم، يعني ابتدا خروجي ها را به موتور متصل کرده و سپس ورودي ها را يکي به – و ديگري به خروجي AND متناظر وصل مي کنيم.
آي سي ULN2003
اين آي سي نيز عملکردي شبيه بافر 74245 دارد، با اين تفاوت که اصطلاحاً(Open collector) است، يعني شما مي توانيد سطح ولتاژ خروجي را خودتان تعيين کنيد و مثل 74245 الزاماً 5ولت نيست. يعني هر ولتاژي (حداکثر تا 50ولت) که شما به پايه ي تغذيه ي آي سي بدهيد، بر روي خروجي ها نيز قرار مي گيرد. اما سطح ولتاژ ورودي همان 0تا 5 ولت است. ترتيب پايه هاي آي سي در زير آمده است.
طبق قولي که داده بوديم از اين به بعد تا پايان تابستون، انشاالله ما هر 5 روز يک جلسه مطلب جديد بر روي سايت قرار خواهيم داد. اميدوارم دوستاني هم که از سرعت پايين کار گلايه داشتند، از روند فعلي کار راضي باشند.
بدون مقدمه ي بيشتر وارد بحث مي شويم...
در جلسه قبل در مورد الگوريتم کلي حرکت يک ربات مسير ياب براي دنبال کردن خط آشنا شديم و ديديم ربات براي دنبال کردن خط بايد با توجه به اطلاعاتي که از سنسورها دريافت مي کند، هرگاه سنسور هر سمت خط را ديد(يعني هرگاه بر روي خط قرار گرفت و خط را حس کرد)، موتور متناظر همان سمت خاموش شود تا ربات روي خط باقي بماند.
همچنين در جلسه ي پيش توضيح داده شد که چگونه مي توان به وسيله ي يک جفت گيرنده فرستنده ي مادون قرمز، خط سياه را در زمينه ي سفيد تشخيص داد.
همانطور که در جلسه ي پنجم توضيح داده شد، ربات به 3 قسمت تقسيم مي شود: 1-ورودي ها 2-پردازش 3-خروجي
تا به اينجا ما در مورد قسمت ورودي هاي ربات، يعني همان گيرنده فرستنده ها توضيحاتي داده ايم. پيشنهاد مي شود براي بالاتر رفتن دقت ربات، براي هر طرف، 3 جفت گيرنده _فرستنده بر روي ربات تعبيه شود.دوستان اگر روي لحيم کاري بردهاي سوراخ دار(يا فيبري) تسلط دارند، مي توانند اين 6 جفت گيرنده_فرستنده را بر روي يک برد هزارسوراخ(فيبري) لحيم کنند.(مانند آخرين عکس جلسه ي پيش ).
به نام خدا
سلام عرض مي کنم خدمت همه هي دوستاي خوبم
اين جلسه قراره انشاالله با هم ساخت يه ربات مسيرياب ساده (بدون ميکروکنترلر) رو با هم شروع کنيم.
کار را ابتدا از قسمت مکانيک شروع مي کنيم، يعني بدنهي فيزيکي ربات
سيستم حركت تانك
تا حالا به حرکت يک تانک جنگي دقت کرده ايد؟ اگر دقت نکرده باشيد هم متوجه خواهيد شد که تانک، مثل خودروهاي شخصي معمولي داراي سيستم فرمان نيست، يعني براي چرخش در سر پيچ ها، چرخهاي جلوي آن به سمت خاصي متمايل نميشوند. پس تانکها چگونه حرکت ميکنند؟
به شکل زير نگاه کنيد
با عرض سلام خدمت همه ي دوستاي خوبم. اميدوارم همگي امتحانات پايان سال رو با موفقيت پشت سر گذاشته باشيد.
ما هم انشاالله از اين جلسه دوره ي جلسات تابستاني رو با سرعت و حرارت بيشتري شروع خواهيم کرد.
مژده: ما در اين جلسه با معرفي چند آي سي جديد مباحث قبلي رو تکميل مي کنيم و انشاالله از جلسهي آينده ساخت يک ربات مسيرياب ساده رو شروع خواهيم کرد. البته اين به معني پايان کار ما نيست ، يعني بهتر اينطوري عرض کنم که تازه ما داريم وارد دنياي رباتيک مي شيم و تا حالا فقط کمي با مقدمات کار آشنا شديم.
بدون مقدمه ي بيشتر وارد بحث اصليمون مي شيم.
در جلسه ي گذشته با عملگرهاي "AND" و "OR" آشنا شديم.در اين جلسه 2 آي سي که اين 2 عمل را براي ما انجام مي دهند به شما معرفي کنيم.
AND
عملگر AND را در مدارهاي شماتيک به صورت که پايههاي 1 و2 ورودي ها و پايهي 3 خروجي است که به اين مجموعه يک گيتِ AND مي گويند.(AND Gate)
آي سي 7408 داراي 4 گيت مجزاي AND ميباشد، يعني ميتواند همزمان 4 عمل AND را انجام دهد. اين آي سي 14 پايه دارد که ترتيب پايههاي آن در شکل زير شرح داده شده.
ما به دليل شروع فصل امتحانات مجبور شديم كمي سرعت كار رو كاهش بديم، انشاالله بعد از پايان فصل امتحانات، با سرعت و نظم بيشتري كار را پيش خواهيم برد.
در اين جلسه ما وارد مبحث الكترونيك ديجيتال خواهيم شد. اين مبحث اهميت بسيار زيادي در كار ما دارد و ما را به صورت خيلي ملموستر وارد دنياي رباتها ميكند. مطالبي كه در اين فصل شما اموزش خواهيد ديد مطالبي جديد و تازه هستند و دوستان بايد با دقت نظر بيشتر مطالب را دنبال كنند.
در بحث ديجيتال ما همه چيز را فقط در 2 حالت 0 يا 1 در نظر ميگيريم. به عنوان مثال ميدانيم كه همواره يك لامپ يا روشن است يا خاموش. در اينجا حالت خاموش را 0 و حال روشن را 1 در نظر ميگيريم. يعني وضعيت هر سيستم (مانند لامپ) را با 0 يا 1 توصيف كنيم.
پس براي توصيف وضعيت يك لامپ ما فقط نيازمند يك عدد 0 يا 1 هستيم ( يك عدد در مبناي 2 ) . يك عدد در مبناي 2 را در زبان لاتين Bit ميگويند(Binary digit ) . پس ما براي گزارش وضعيت يك لامپ فقط به 1 بيت اطلاعات نياز داريم.
ما در بحث الكترونيك ديجيتال 0و1 را با 0 و 5 ولت شبيه سازي مي كنيم، يعني هنگامي كه يك پايهي يك آي-سي خروجي 5ولت ميدهد ميگوييم خروجي 1 است و وقتي 0 ولت ميدهد خروجي 0 است.
عملگر(Operator) و عملوند(Operand):
جمع"+" ، منها"–" ، ضرب"×" ، تقسيم "÷" و... سادهترين عملگرهايي هستند كه شما تا كنون با آنها آشنا شدهايد. اين عملگرها هر كدام وظايفي دارند، مثلاً عملگر "+" دو عدد را با يكديگر جمع ميكند و حاصل را در خروجي ذخيره ميكند. اين دو عدد را كه عمليات ( در اين مثال عمليات جمع) روي آنها اجرا ميشود، عملوند ميگويند.
اين جلسه آخرين جلسه از بخش الكترونيك آنالوگ ما هست و انشاالله از جلسهي آينده، وارد مبحث الكترونيك ديجيتال خواهيم شد.
بحث اين جلسهي ما در مورد تقويت كنندههاي تفاضلي (Op-Amp) ها ميباشد. همانطور كه درجلسهي هفتم نيز توضيح داده شد، اين ICها ميتوانند با اتصال ترکيب مناسبي از عناصر خارجي مثل مقاومت،خازن،ديود و غيره به آنها، كاربردهاي متعددي از جمله تقويت كنندگي و مقايسه كنندگي و ... داشته باشند.
معروفترين Op-Amp آي سي LM358 ميباشد كه يك آي سي 8 پايه است و داراي 2 واحد مستقل Op-Amp ميباشد.
مقايسهي 2 ولتاژ ورودي توسط Op-Amp از مهمترين كاربردهاي آن در مدارهاي الكترونيكي ميباشد كه در ادامه در اين مورد توضيح داده شده است.
با عرض سلام و تبريک سال نوي خورشيدي خدمت همه ي دوستان خوبم
سالي سرشار از شادي و برکت رو براي همه ي دوستان و همه ي هم وطنان عزيزم آرزو مي کنم.
اميد واريم در سالي که از سوي رهبر کبير انقلاب، سال نوآوري و شکوفايي ناميده شده است، فرصت ها و بسترها ي مناسب براي رشد و شکوفايي علاقه مندان و دانشمندان همه ي علوم از جمله علم رباتيک، که علمي پيشرو و پر اهميت در سطح جهان مي باشد، بيش از پيش فراهم آيد.
بدون مقدمه ي بيشتر سومين آزمايش رو با هم شروع مي کنيم.
نحوه ي استفاده از منبع تغذيه ي کامپيوتر، به عنوان مولد:
در اين جلسه، دومين آزمايش رو با کمک دوستان عزيز انجام خواهيم داد.
اين آزمايش مربوط به مبحث خازن ها مي شود و براي نشان دادن شارژ(پر شدن) و دِشارژ (خالي شدن) شدن يک خازن طراحي شده است.
گام اول: مدار زير را با توجه به جدول ببنديد.
C=2200µF
C=1000µF
C=470µF
=T3
=T2
=T1
R=220?
=T6
=T5
=T4
R=1K?
زمان شارژ و دِشارژ با توجه به زمان روشن بودن LED ها، به ازاي خازن هاي مختلف اندازه گيري نماييد.
براي شارژ كردن خازن بايد اتصال شماره ي 1 برقرار شود، زمان شارژ را ميتوانيد با توجه به مدت روشن بودن LED سمت چپ اندازه گيري نماييد
براي دِشارژ كردن خازن، بايد اتصال شماره ي 2(طبق شكل) برقرار شود. پس زمان دِشارژ را نيز ميتوانيد با توجه به مدت زمان روشن بودن LED سمت راست،اندازه گيري نماييد.
همانطور كه مشاهده مي كنيد، با افزايش مقدار مقاومت در هر قسمت يا افزايش ظرفيت خازن ها، زمان شارژ و دِشارژ خازن افزايش ميابد.
اين جلسه مطلب تئوري نسبتاً كمي دارد و دوستان بايد زمان خود را صرف بستن مدار بالا و پركردن جدول كنند.
لازم ميدونم اين مطلب رو دوباره خدمت دوستان عزيز يادآوري كنم كه در رباتيك، مهمترين اصل، انجام كار به صورت تيمي و گروهي است و به دوستان پيشنهاد ميكنم حتماً آزمايش ها رو به صورت تيمي انجام بدهند.
اگر دوستان در روند كار با مشكل يا مسئلهاي روبرو شدند حتماً با ما در ميون بگذارند.
دلتان می خواهد یک اسکلت خارجی داشته باشید؟ در واقع لباسی مکانیکی که آن را می پوشید و توانایی های جدیدی به شما اضافه می کند. ایده ای که سال ها توسط شرکت های مختلف توسعه داده شده و مدل های مختلفی از آن تولید شده است.
اما یک اسکلت خارجی به چه دردی می خورد؟ یک کاربرد آن برای کسانی است که به خاطر بیماری و مشکلات عضلانی نمی توانند بدون کمک راه بروند. اما این اسکلت خارجی توسط افراد سالم هم قابل استفاده است. تصورش را بکنید که با پوشیدن آن بتوانید اشیا بسیار سنگین را به راحتی بلند کنید و یا با سرعت خارق العاده بدوید. اینها بخشی از مزایایی است که این گجت جدید در اختیارتان قرار می دهد.
حالا ناسا هم وارد کار ساخت این لباس آهنی شده است. هدف اولیه آنها ساخت مدلی بوده تا فضانوردتان بپوشند و در فضا کارهایشان را راحت تر انجام بدهند. اما ناسا تصمیم گرفته که آن را برای انسان های روی زمین هم بسازد.
این لباس آهنی دارای ۴ موتور و ۶ مفصل است در مجموع ۲۵ کیلوگرم وزن دارد. گفته می شود که بسیاری از فناوری های روباتیک توسعه یافته توسط ناسا در آن استفاده خواهد شد. نام آن X1 است و فعلا در مراحل آزمایشی قرار دارد. اما احتمالا تا چند سال دیگر می توانید دنبال خرید اش در بازار باشید.
در مدت زمان امتحانات، ما سعي کرديم حجم کار و مطالب ارايه شده را تا حد ممکن کم کنيم تا دوستان دچار مشکل نشوند. ولي طبق قولي که داده بودم ، بعد از امتحانات کار رو به صورت خيلي جدي تر و با سرعت بيشتر دنبال مي کنيم. جلسات آزمايشگاه نيز به صورت جدي شروع خواهند شد تا دوستان کاربرد عملي اِِلِمان هاي معرفي شده را ياد بگيرند.
درضمن وظيفه ي خودم مي دونم تا از دوستاني که در اين مدت کمي از سرعت پايين کار گلايه داشتند نيز جداً عذرخواهي کنم.
خوب، بريم سراغ کارمون. قرار شد در اين جلسه،ابتدا همه ي وسايل و قطعاتي که براي چند جلسه ي آينده نياز داريم رو من به دوستان معرفي کنم، تا براي خريد هر قطعه مجدداً وقت شما گرفته نشود.
من هم ايام سوگواري سالار شهيدان خدمت دوستاي عزيزم تسليت عرض مي کنم
خوب، همونطور که قول داده بوديم، قرار شد جلساتي به کار عملي با قطعاتي که تا حالا با اونها آشنا شديم اختصاص داده بشود.
ما در اين جلسات نحوه ي کار با قطعات مختلف را به صورت کاملاً عملي به همراه عکس ها متعدد و در صورت نياز با فيلم، آموزش خواهيم داد. دوستاني هم که علاقه مند هستند مي توانند با تهيه ي يک سري لوازم، آزمايش ها رو به صورت واقعي در منزل يا مدرسه تکرار کنند. فقط فراموش نکنيد که اگر به دنبال نتيجه ي مطلوب هستيد، از کار انفرادي خودداري کنيد!!!! البته توضيحات لازم در اين زمينه در جلسه ي اول داده شده.
بعضي لوازم اوليه اي که شما براي کار نياز داريد در زير گفته شده:
در اين جلسه قصد داريم در باره ي عملکرد دو دسته از هايIC بسيار پر کاربرد در الکترونيک صحبت کنيم بسياري از المانهاي الکترونيکي و به خصوص IC هاي ديجيتالي، قابليت جريان دهي محدودي دارند و قطعاتي مانند موتور، لامپ ، رله و ... که مصرف جريان زيادي دارند را نمي توان مستقيم به آن ها متصل نمود.
علاوه بر اين در بعضي مدارات ممکن است خروجي يک IC به ورودي چند IC ديگر داده شود. براي هر IC پارامتري به نام Fan-Out تعريف مي شود که مشخص مي کند خروجي IC به ورودي چند IC مي تواند داده شود. در بعضي موارد که تعداد اتصالات بيشتر از Fan-out آي سي باشد، IC نمي تواند جريان لازم براي تغذيه ي تمام خروجي هايش را فراهم کند و خروجي اش افت مي کند. در چنين مواردي مي بايست از ICهاي بافر استفاده نمود. به عبارت ديگر Fan-out بافر ها بسيار زياد است.
يک خبر خوب: ما از بعد از پايان امتحانات ترم و قبل از شروع دوره ي الکترونيک ديجيتال، جلسات آزمايشگاه خواهيم داشت. در اين جلسات ما نحوه ي کار با قطعاتي که تا حالا به صورت تؤري با انها آشنا شديم رو به صورت عملي توضيح خواهيم داد. دوستاني که علاقه مند هستند تا اين آزمايشها را در منزل خودشون تکرار کنند بايد يک سري وسايل اوليه براي کار رو در منزل فراهم کنند. وسايلي که براي کار نياز هست نيز در جلسات آينده معرفي خواهيم کرد.
در جلسات پيش به يک قطعه ي الکترونيکي به نام رگولاتور اشاره کرديم ، مي خواهيم در مورد کارکرد و انواع اين قطعه در اين جلسه توضيح دهيم.
سلام به دوستاي عزيزم
با عرض پوزش فراوان به خاطر بدقولي در ارايه ي مطلب، با توجه به شروع فصل امتحانات و نظرات دوستان، ما مجبور شديم سرعت کار رو کاهش بديم تا همه ي عزيزان علاقه مند بتونن مطالب ارايه شده را با همين نظم و ترتيب و همراه با ما خوانده و استفاده کنند. ما سعي خواهيم کرد در بازه ي زماني امتحانات حجم و سرعت ارايه ي مطالب رو کاهش بديم تا دوستان عزيز دچار مشکل نشوند. انشاالله از بعد از امتحانات ترم، ما کار را به صورت جدي تر و سري تري دنبال خواهيم کرد...
از مبحث ديود ها، ديود نوري، 7Segment و گيرنده فرستنده ي مادون قرمز باقي مونده که در اين جلسه ابتدا به توضيح اين قطعات خواهيم پرداخت.
اجازه بديد بحث جلسه ي پيش رو بدون هيچ مقدمه اي دنبال کنيم، يعني ديود:
همانطور که مي دانيد ديودها جريان الکتريکي را در يک جهت از خود عبور ميدهند و در جهت مخالف در مقابل عبور جريان از خود مقاومت نشان ميدهند(اين مقاومت آنقدر زياد است که تقريباً عايق مي شوند و جرياني عبور نمي دهند).جالبه که بدانيد به همين دليل در سالهاي اوليه ساخت اين وسيله الکترونيکي، به آن دريچه(Valve )هم مي گفتند.
هنگامي که پايه ي مثبت ديود به قطب + منبع تغذيه(باطري يا هر مولد ديگر) و پايه ي منفي آن به قطب – متصل شود، ديود جريان را عبور داده و اگر برعکس وصل شود تقريباً جريان قطع مي شود.
براي فعال شدن ديود بايد بين 2 سر آن حداقل 0.6 الي 0.7 ولت اختلاف پتانسيل برقرار شود، يعني اگر کمتر از اين مقدار ولتاژ بر روي آن قرار گيرد، ديود هيچ جرياني را از خود عبور نمي دهد. اين ولتاژ را ولتاژ آستانه(Forward Voltage Drop) مي گويند.
هنگامي که شما ولتاژ معکوس به ديود متصل مي کنيد(- به + ، + به -)، ديود جرياني بسيار کوچک و در حدA ? يا حتي کمتر از آن را از خود عبور مي دهد، ولي اين مقدار آنقدر کم است که هيچ تاثيري بر مدارهاي ما نخواهد داشت.
نکته ي مهم: ديودها يک آستانه(Limit) براي حداکثر ولتاژ معکوس دارند که اگر ولتاژ معکوس از آن بالاتر رود، ديود بر اثر پديده ي فروشکست ميسوزد و جريان را در هر دو جهت عبور ميدهد. اين ولتاژ را آستانه شکست (Break Down) مي گويند.
با سلام خدمت دوستاي عزيز
خوب، بدون مقدمه به ادامه ي بحثمون درباره ی مقاومت و بعد از اون ،خازن ها مي پردازيم
مقاومت ها را در مدار بر حسب نوع کاربرد مي توانيم به 2 صورت سري و موازيببنديم:
مقاومت هاي سري يا متوالي:
اگر چند مقاومت را در مدار به صورت پشت سرهم ببنديم، يعني هر2مقاومت متوالي در يک سر با هم مشترک باشند (به شکل دقت کنيد)، آنگاه مي گوييم مقاومت ها را با هم سري کرده ايم
دقت کنید که اگر بین دو مقاومتی که با یک دیگر سری شده اند، هر اتصال دیگری به جز دو سر مقاومتها قرار دهید، دیگر دو مقاومت با هم سری نیستند. یعنی به زبان ساده تر بین دو مقاومتی که سری شده اند ، هیچ چیز به جز یک سیم که دو سر مقاومت ها را به وصل کرده است نباید وجود داشته باشد.
نکته: در مداراتی مشابه مدار بالا که در آن چندین مقاومت به یکدیگر متصل شده اند، می توان به جای استفاده از چندین عدد مقاوت، از 1 مقاومت استفاده کرد که اندازه ی آن معادل مجموع این چند مقاومت باشد. به این مقاومت، "مقاومت معادل" می گویند. به طور خلاصه "مقاومت معادل" يعني مقاومت نهايي مجموعه مقاومت ها.
براي به دست آوردن مقاومت معادل جند مقاومت که به صورت سري بسته شده اند، کافيست اندازه ي هر مقاومت را با بعدي جمع کنيم يعني: (Totمخفف کلمه يTotal به معناي کل مي باشد)
مثال: مقاومت معادل مجموعه ي زير بدين صورت است: ? 19=12+4+3
مقاومت هاي موازي:
اگر چند مقاومت را در مدار به شکلي ببنديم که ابتدا و انتهاي همه ي آنها به همديگر متصل باشند(به شکل دقت کنيد)، آنها را با يکديگر موازي کرده ايم.
براي بدست آوردن مقاومت معادل در اين حالت از اين فرمول استفاده مي کنيم:
مثال: مقاومت معادل مجموعه ي زير بدين صورت است:
?
مدارهاي الکترونيکي ممکنه ترکيبي از مقاومت هاي سري و موازي باشند، در اين صورت براي به دست آوردن مقاومت معادل بايد سعي کنيم مساله را به قسمت هاي کوچکتر تبديل کنيم و مقاومت هر قسمت را جداگانه محاسبه و با قسمت ديگر جمع کنيم. به مثال دقت کنيد:
خازن يک قطعه ي الکتريکي مي باشد که مي تواند مقداري بار الکتريکي در خود ذخيره کند و در هنگام نياز به مدار باز گرداند(ميزان عبور بار الکتريکي در واحد زمان از يک نقطه را همان جريان الکتريکي آن نقطه مي گويند.بار الکتريکي همان الکترون هايي آزادي هستند که وقتي بين 2 قطب حرکت مي کنند موجب به وجود آمدن جريان الکتريکي مي شوند ). خازن ها انواع گونگوني دارند، از جمله خازن هاي عدسي، الکتروليتي، سراميکي و... .
خازن ها از پرکابردترين قطعات الکتريکي هستند که در مدارهاي مختلف مورد استفاده قرار مي گيرند. اگر مايليد که در باره ي خازن ها اطلاعات جامع تري تري داشته باشيد مي تونيد به کتاب « فيزيک 3 و آزمايشگاه» مراجه کنيد.
خازن را در طراحي هاي شماتيک به شکل نمايش مي دهند.
ميزان باري که در خازن ها ذخيره مي شود به ظرفيت انها بستگي دارد.
ظرفيت خازن:
ظرفيت خازن عبارتست از نسبت بار ذخيره شده در خازن به اختلاف پتانسيل 2 سر خازن : که (C)نماد ظرفيت خازن و (q) هم همان بار الکتريکي ذخيره شده در خازن مي باشد.
به پاس خدمات فراوان مايکل فارادي ، فيزيکدان انگليسي، يکاي ظرفيت «فاراد» ناميده شده.
نکته ي مهم اينکه خازن ها بعد از پر شدن(قرار گرفتن بار الکتريکي تا حد ظرفيت در آنها را پر شدن مي گوييم) ديگر هيچ جرياني را از خود عبور نمي دهند. ما از اين خاصيت خازن استفاده هاي فراواني خواهيم کرد.
در مورد خازن ها مطالب فراووني براي گفتن وجود داره که تا حد نياز در جلسات آينده درباره ي آن خواهيم گفت.
خدا نگه دار
به لطف خدا بخش رباتيک شبکه ي رشد از امروز فعاليت خودشو شروع کرد، هدف اصلي ما در اين بخش برگزاري دوره هاي آموزش رباتيک و ارائهي مشاوره در زمينهي رباتيک ميباشد. البته بخشهاي جانبي مانند «اخبار» و «تازه ها» و «پيوندهاي مفيد» و... نيز خواهيم داشت.
روش کار به اين صورتست که ما هر هفته يک يا دو جلسه از کلاس را به صورت متن و عکس و فلش و فيلم و.... در همين قسمت ارائه مي کنيم، شما مطالب ارائه شده را مي خونيد و سوالات خودتونو مطرح مي کنيد، ما بعد از پاسخ به سوالات شما، قسمت بعدي درس (جلسهي بعد) را ارائه ميکنيم.
یک نکته ی مهم:
اين بخش براي دانش جويان وهر کسي که به رباتيک علاقه منده هم قابل استفاده است و فقط ويژهي دانشآموزا نيست. البته ما مجبوريم بنا کار را بر سطح علمي دانشآموزاي دبيرستاني بگذاريم، هر چند که اين امر اهميت زيادي ندارد چون ما به جز بخش «خازن و مقاومت» ديگه خيلي کار زيادي با درسهاي دبيرستاني نداريم.
تذکر خيلي مهم: یکی از مهمترین نکات آموزشی که در بحث روباتيک وجود دارد انجام پروژه به صورت تيمي و گروهي (Team Working) است. در حقیقت می توان گفت تمرین کار گروهی یکی از مهمترین جنبه های آموزش روباتیک است.
چند نمونه از مهمترين فوايد کار تيمي رو به صورت خيلي خلاصه عرض می کنم تا اهميت اين موضوع برای دوستان عزیز بیشتر تبیین شود:
1_ کسب مهارت هاي لازم براي انجام پروژههاي بزرگ که بايد با مشارکت چندين فرد اجرا شوند.
2_ استفاده از فکر و توانايي چند نفر به جاي يک نفر و در نتيجه اتخاذ تصميم مناسب تر.
3_ تقسيم وظايف بين افراد تيم و کاهش فشار کار بر روي فرد.
4_ تقسيم هزينه هاي پروژه بين افراد تيم .
5_افزايش انگيزه و روحيه افراد تيم .
6_ استفاده از ايدههاي بکري که هر يک از اعضا ممکنه در روند کار به ذهنشون برسه. وقتي يک مسئله مطرح مي شود، هر فرد از يک زاويهي خاص به مسائله نگاه ميکند و همين امر موجب ارائهي ايدههاي متفاوت براي حل مسئله خواهد شد!
و ......
اجازه بديد حالا يه کم شمارو با دنياي ربات ها بيشتر آشنا کنیم.
رباتيک در حالت کلي به 2 بخش شبيه سازي (Simulation)، و ربات حقيقي (Real) تقسيم بندي ميشود. در شبيهسازي در حقيقت رباتي به صورت فيزيکي ساخته نميشود و ساخت ربات در يک محيط مجازي شبيه سازي شده که در آن بعضي از قوانين دنياي واقعي وجود دارد صورت ميگيرد. در اين بخش مسابقاتي در رشته هاي «شبيه سازي امداد ونجات» (Rescue Simulation) و «شبيه سازي فوتبال» (Soccer Simulation) و... هرسال در جهان برگزار ميشود. در بخش Real مسابقات بسيار متنوع تري نسبت به Simulation وجود دارد که مهمترين اونها عبارتند از: رباتهاي فوتباليست(در چندين سطح مختلف)، رباتهاي امدادگر، رباتهاي مسيرياب (Path Finder)، رباتهاي آتش نشان (Fire Fighter)، ربات هاي مين ياب (Deminer)، رباتهاي لابيرنت، رباتهاي انسان نما (Humanoid)، سگها (Four legged Robot)، ربات هاي خانگي(At home) و... .
فدراسيون جهاني رباتيک هر ساله جام جهاني روباتها با نام "Robocup" را در بخشهاي مختلفي برگزار ميکند. هدف آرماني اين فدراسيون اين است که سال 2050، قهرمانRobocup، تيم منتخب فوتبال جهان را شکست دهد...!!!
دقت کنید که واژه ی روبوکاپ(RoboCup) مختص مسابقات جهانی است که زیر نظر فدراسیون جهانی آن برگزار می شود , هر چند در کشور ما این واژه بعضاً با مفاهیمی چون لیگ شبیه سازی و ... معنی می شود که همگی نا درست هستند.
کميتهي Robocup براي گسترش رباتيک در سطح دانشآموزي، بخشي ويژهي دانشآموزان (Junior) در نظر گرفته است که در اين بخش تمام تيم هاي شرکت کننده دانش آموز هستند و رباتهاي ساخته شده نيز پيچيدگي رباتهاي بخش بزرگسالان را ندارند...
و اما تقسیم بندی آموزشی ما:
مطالبي که قراره اينجا در غالب رباتيک ارائه شود شامل 3 بخش کامپيوتر، الکترونيک و مکانيک هستند.
البته فکر ميکنم در زمينه ي مکانيک ما بحث زيادي نخواهيم داشت چون مهارتهاي لازم براي کار را در درس حرفهوفن و کارهاي روز مره تا حد زيادي بدست آورديد.
ما کارمون رو در زمينه ي الکترونيک به 2 بخش آنالوگ و ديجيتال تقسيم ميکنيم و با آنالوگ بحث را شروع ميکنيم.
ادامه ي بحث در جلسهي بعد....
منتظر سوالها و نظرات و پيشنهادهاي دوستاي عزيزم هستم
از اين جلسه ديگه به طور جدي کار ما شروع مي شه و وارد قسمت هاي مهم کار خواهيم شد. دوستان سعي کنن مطالب رو به صورت متوالي و منظم دنبال کنند، چون مطالبي که ارايه مي شوند کاملاً به هم مرتبط اند و اگر مطلبي رو متوجه نشويد، در بحث هاي بعدي نيز احتمالاً دچار مشکل خواهيد شد.
خوب، مي دونم شما هم مثله من عجله داريد که زودتر وارد بحث اصلي بشيم، پس بدون حاشيه ي بيشتر شروع مي کنيم.
ما آنالوگ رو با معرفي 3 کميت "اختلاف پتانسيل(V)"(Voltage)، "جريان(I) "(Current)و "مقاومت(R)"(Resistor) شروع مي کنيم. البته اين کميت ها رو احتمالاً بخش زيادي از دوستان مي شناسند زيرا هر 3 کميت در بخش" الکتريسيته" ي "فيزيک 1 و ازمايشگاه" به تفصيل معرفي شده اند.
اختلاف پتانسيل(V):
ساده ترين تعريفي که براي (V) وجود دارد اين است که اختلاف پتانسيل را عامل برقرار شدن جريان الکتريکي در مدار مي دانند. براي اينکه شما اين کميت رو بهتر لمس کنيد يک مثال ساده مي زنم (البته اين مثال در همه ي قسمت هاي بحث صادق نيست).
فرض کنيد 2 سطل آب در اختيار داريم با نام هاي "A"و"B" . سطل Aپر از آب و با اختلاف ارتفاع 1 متر بالاتر از سطل B قرار دارد. 2 سطل رو با يک شيلنگ به همديگه وصل مي کنيم. در اين حالت مشاهده خواهيم کرد که اب از سطل A به درون B جاري مي شود. حالا اگر جاي 2 سطل رو با هم عوض کنيم جريان آب عکس مي شود و از سطل B به سطل A جاري خواهد شد و اگر 2 سطل را هم ارتفاع کنيم ، هيچ جرياني نخواهيم داشت. يعني اين اختلاف ارتفاع عامل جاري شدن آب بين 2 سطل مي باشد.
در حقيقت در اين مثال آب نقش الکترونها رو بازي ميکنه و شيلنگ نقشه سيم، و AوB هم 2 قطب +و- باطري يا مولد الکتريکي. و در نهايت اختلاف ارتفاع بين 2 سطل هم نقش اختلاف پتانسيل بين 2 قطب رو بازي مي کنند.
يکاي اختلاف پتانسيل "ولت" مي باشد.
جريان الکتريکي(I):
براي تعريف جريان از مثال قبليمون کمک مي گيريم. در مثال بالا جريان آب نقش جريان الکتريکي را بازي ميکنه (دقت کنيد که سرعت الکترونها ثابت و تقريباً برابر سرعت نور مي باشد ولي همونطور که مي دونيد سرعت آب در اين مثال تابعي از شتاب جاذبه ي زمين(g) است.) . در حقيقت حرکت الکترونها بين 2قطب مولد را جريان الکتريکي مي ناميم.
يکاي جريان به پاس خدمات علمي فيزيک دان فرانسوي "ماري آمپر" ،"آمپر(A)" نام گذاري شده است.
مقاومت(R):
مقاومت در حقيقت عاملي مزاحم براي جريان مي باشد، يعني هر چه مقاومت بيشتر باشد جريان کمتر است. براي مثال فرض کنيد شما با عجله در حال دويدن در يک پياده روي شلوغ هستيد ، به طبع هر چي پياده رو شلوغتر باشه حرکت براي شما سخت تر و کندتر خواهد بود. اين شلوغي مزاحم مشابه همون مقاومت الکتريکي در يک سيم عمل ميکنه.
مقاومت الکتريکي رساناها (موادي که جريان الکتريکي را از خو عبور مي دهند) ي مختلف با يکديگر متفاوت است و مقاومت هر ماده فقط بستگي به مشخصات ساختماني و دماي اون ماده دارد. در رساناهاي معمولي، هر چه دما بالاتر برود، مقاومت بيشتر مي شود.(افزايش دما موجب افزايش بي نظمي در ساختار مولکولي رسانا مي شود)
يکاي اندازه گيري آن به پاس خدمات علمي "گئورگ زيمون اهم"، "اهم" ناميده شده که آنرا با (?) نمايش مي دهيم. (امگا? از حروف يوناني مي باشد)
مقاومت در مدارهاي شماتيک به شکل نمايش داده مي شود.
قانون اهم:
در همون مثال سطل ها اگر اختلاف ارتفاع 2 سطل را بيشتر کنيم، مشاهده خواهيم کرد که شدت جريان آب نيز بيشتر مي شود. تجربه نيز نشان مي دهد که هرچه اختلاف پتانسيل دو سر رسانا بيشتر شود ، شدت جريان عبوري نيز بيشتر مي شود. اما اهم براي اولين بار کشف کرد که نسبت V به I (V / I) همواره مقداري ثابت است که اين مقدار ثابت همان مقاومت الکتريکي است. يعني: V / I =R ? V=I R
براي مثال اگر در مدار روبه رو V=10 باشد و امپرسنج عدد 2 را نشان دهد و مقاومت سيم ناچيز باشد انگاه طبق رابطه خواهيم داشت:
V=10 و V / I =R ? I=2. پس اين مقاومت 5? مي باشد.
مطالب تکميلي مقاومت ها:
مقاومت شايد پرکاربردترين قطعه ي مدارهاي ما خواهد بود. چون ما بوسيله ي اين قطعه مي توانيم شدت جريان را در قسمت هاي مختلف مدار کنترل کنيم. مقاومت ها در حالت کلي به 2 دسته ي ثابت و متغير تقسيم مي شوند. مقاومت هاي نوري دسته اي از مقاومت هاي متغير هستند که نسبت به نور محيط مقاومت انها تغيير مي کند، يعني در محيط هاي پر نور مقاومت آنها کمتر و در محيط هاي کم نور مقاومت آنها بيشتر مي شود.
دسته ي ديگري از مقاومت هاي متغير وجود دارند که به صورت دستي مقاومت آنها تنظيم مي شود که به آنها پتانسيومتر نيز گفته مي شود.
کدخواني مقاومت ها:
کارخانه هاي سازنده مقاومت ها براي سهولت در توليد، اندازه هاي استانداردي را براي ساخت مقاومت ها تعيين مي کنند و با نوار هاي رنگي دور آنها اندازه ي مقاومت ها را مشخص مي کنند. در انتها نيز با يک نوار نقره اي يا طلايي درصد خطا را مشخص مي کنند. چون ماده ي اصلي ساخت اين مقاومت ها کربن مي باشد ،به انها مقاومت کربني نيز گفته مي شود.
براي خواندن ميزان مقاومت کربني،آن را جوري دست مي گيريم که حلقه ي طلايي يا نقره اي در سمت راست قرار بگيرد. حالا به ترتيب رنگ اولين حلقه از سمت چپ کد رقم اول، دومين حلقه از سمت چپ رقم دوم، و سومين حلقه از سمت چپ رقم n مي باشد که n توان دهي است که ضريب 2 عدد قبلي مي باشد.(اگر 5 حلقه داشتيم، حلقه ي سوم رقم سوم مي باشد و حلقه ي چهارم n است، حلقه ي پنجم هم همون درصد خطاست)
جدول کد رنگ ها بدين صورت مي باشد:
رنگ حلقه
عدد مربوط به آن
سياه
0
قهوهاي
1
قرمز
2
نارنجي
3
زرد
4
سبز
5
آبي
6
بنفش
7
خاكستري
8
سفيد
9
به عنوان مثال اگر روي يک مقاومت به ترتيب از چپ به راست نوار قهوه اي، سياه و قرمز باشد اندازه ي مقاومت عبارتست از: يعني اين مقاومت 1000 اهم يا 1 کيلواهم (1K ?)مي باشد.
حلقه ي آخر که معمولاً طلايي يا نقره ايست حلقه ي تلورانس نيز نام دارد که در کار ما خيلي اهميت زيادي ندارد.
به شکل زير دقت کنيد:
به مثال زير توجه کنيد:
نقره اي 4 7 2
پس اين مقاومت 270k? يا 270000? مي باشد.
بحث در مورد مقاومت بازم ادامه داره ، جلسه ي بعد اين بحث رو دنبال خواهيم کرد...
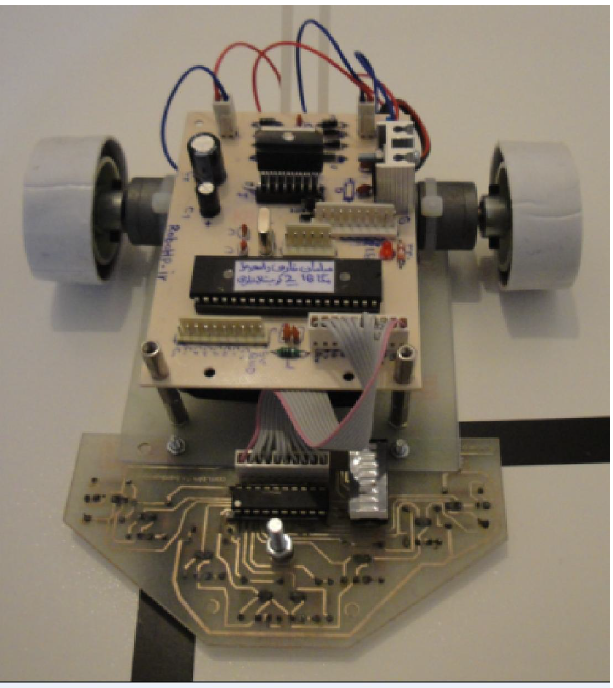
این ربات که مشاهده میکنیدیک ربات مسیریاب بسیارخوب میباشد.
مشخصات فنی ربات رام 2(قابلیت ها)
RAM2:
1-ربات چند کاره(مسیریاب-مسیریاب ویژه-ماز-میکروموس-امدادگر دانش آموزی)
2-مجهز به 7 سنسور خط یاب مادون قرمز
3-دارای نشانگر LED وضعیت عملکرد سنسورها با رنگهای متفاوت
4-مجهز به میکروکنترلر قدرتمند MEGA16A
5-قابلیت اتصال به کامپیوتر و برنامه ریزی مستقیم روی برد اصلی
6-قابلیت کنترل سرعت موتورها از صفر تا حداکثر توسط پالس های PWM
7-دارای ابعاد کوچک که میتواند به عنوان کوچکترین ربات در مسابقات شرکت کند
8-مجهز به موتور گیربکس 600 دور تمام فلزی با جنس مرغوب
9-قابل تغییر به رباتهای مین یاب و آتش نشان با کمی تغییرات در مدار
10-قابلیت آموزش راه اندازی موتور جریان مستقیم و سروو موتور و موتور پله ای و LCD کاراکتری و ساخت ساعت و کرنومتر و ...
11-برنامه نویسی کاملآ استاندارد توسط دو نرم افزار کدویژن و بیسکام
12-دارای بردسه گانه یکپارچه و قطعات قابل تعویض
13-راه اندازی با ولتاژ 9 تا 12 ولت
14-جلوگیری از صدمه دیدن مدارات در برابر اعمال ولتاژ معکوس
15-دارای پروگرامر استاندارد USB که میتوان توسط آن علاوه بر برنامه ریزی ربات آنرا مورد آزمایش اولیه قرار داده و همچنین توسط این پروگرامر میتوان هر نوع ربات با میکروکنترلر MEGA را برنامه ریزی کرد که این یک ویزگی منحصر به فرد میباشد
16-قابلیت استفاده ازlcd
برای اطلاع ازقیمت باشماره 09363467410آقای پهلوانپورتماس بگیرید.
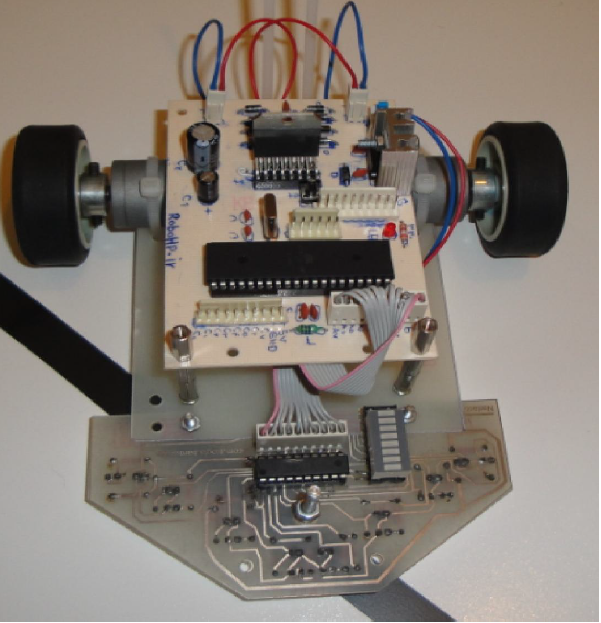
این ربات که مشاهده میکنیدیک ربات مسیریاب بسیارخوب میباشد.
مشخصات فنی ربات رام 1 (قابلیت ها)
RAM1:
1-ربات چند کاره(مسیریاب-مسیریاب ویژه-ماز-میکروموس-امدادگر دانش آموزی)
2-مجهز به 8 سنسور خط یاب مادون قرمز
3-دارای نشانگر LED وضعیت عملکرد سنسورها با رنگهای متفاوت
4-مجهز به میکروکنترلر قدرتمند MEGA16A
5-قابلیت اتصال به کامپیوتر و برنامه ریزی مستقیم روی برد اصلی
6-قابلیت کنترل سرعت موتورها از صفر تا حداکثر توسط پالس های PWM
7-دارای ابعاد کوچک که میتواند به عنوان کوچکترین ربات در مسابقات شرکت کند
8-مجهز به موتور گیربکس 600 دور تمام فلزی با جنس مرغوب
9-قابل تغییر به رباتهای مین یاب و آتش نشان با کمی تغییرات در مدار
10-قابلیت آموزش راه اندازی موتور جریان مستقیم و سروو موتور و موتور پله ای و LCD کاراکتری و ساخت ساعت و کرنومتر و ...
11-برنامه نویسی کاملآ استاندارد توسط دو نرم افزار کدویژن و بیسکام
12-دارای بردسه گانه یکپارچه و قطعات قابل تعویض
13-راه اندازی با ولتاژ 9 تا 12 ولت
14-جلوگیری از صدمه دیدن مدارات در برابر اعمال ولتاژ معکوس
15-دارای پروگرامر استاندارد USB که میتوان توسط آن علاوه بر برنامه ریزی ربات آنرا مورد آزمایش اولیه قرار داده و همچنین توسط این پروگرامر میتوان هر نوع ربات با میکروکنترلر MEGA را برنامه ریزی کرد که این یک ویزگی منحصر به فرد میباشد
قابلیت افزایش تعداسنسورهابرای تشخیص بهتروافزایش سرعت
برای اطلاع ازقیمت باشماره 09363467410آقای پهلوانپورتماس بگیرید.
بهرهگیری از روشهای مدرن ساخت نه تنها باعث میشود قیمت نهایی محصول کاهش پیدا کند بلکه امکان استفاده از ترکیبات تازه و ساخت ساختارهای پیچیدهتر را به این صنعت خواهد داد.
تبادل لینک هوشمند برای تبادل لینک ابتدا ما را با عنوان فروشگاه رباتیک و آدرس robohp.LXB.ir لینک نمایید سپس مشخصات لینک خود را در زیر نوشته . در صورت وجود لینک ما در سایت شما لینکتان به طور خودکار در سایت ما قرار میگیرد.



 آشنايي با مسابقات رباتيك. ليگ رباتهاي جستجوگر، ليگ رباتهاي فوتباليست و ...
آشنايي با مسابقات رباتيك. ليگ رباتهاي جستجوگر، ليگ رباتهاي فوتباليست و ...





 که پايههاي 1 و2 ورودي ها و پايهي 3 خروجي است که به اين مجموعه يک گيتِ AND مي گويند.(AND Gate)
که پايههاي 1 و2 ورودي ها و پايهي 3 خروجي است که به اين مجموعه يک گيتِ AND مي گويند.(AND Gate)







 (Totمخفف کلمه يTotal به معناي کل مي باشد)
(Totمخفف کلمه يTotal به معناي کل مي باشد) ? 19=12+4+3
? 19=12+4+3





 نمايش مي دهند.
نمايش مي دهند. که (C)نماد ظرفيت خازن و (q) هم همان بار الکتريکي ذخيره شده در خازن مي باشد.
که (C)نماد ظرفيت خازن و (q) هم همان بار الکتريکي ذخيره شده در خازن مي باشد.









 نمايش داده مي شود.
نمايش داده مي شود.